We recently reviewed the current status of autonomous driving in the automotive industry and why the general consensus among experts is that we are still far off from seeing mainstream Level 5 fully-autonomous vehicles. While much of the technology needed to power self-driving cars already exists to some degree (and some would argue it all already exists), the challenge of ensuring that vehicles have the underlying infrastructure that supports fully autonomous driving while maintaining security and safety remains.
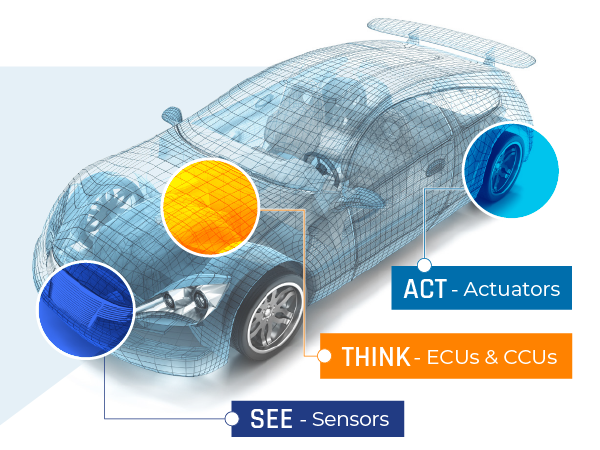
To reach full autonomy, cars must be able to see, think, and act on their own, in less time than a human would, while taking into account hundreds of parameters at once. These parameters go beyond just being able to identify obstacles in the road - the cars need to account for the unpredictability of the drivers, bikers, and pedestrians around them all while quickly managing an ever-increasing amount of data and analysis in real-time.
In this article, we will explore these three essential capabilities that the cars must be capable of and the technological solutions that enable the shift to fully autonomous vehicles.
(It’s important to note that this is by no means an exhaustive list of what is still required for Level 5 autonomy. There are also many ethical questions that arise in relation to autonomous vehicles, such as how to best program a car to make decisions about limiting damages or preventing loss of life. The purpose of this blog is merely to highlight some of the historically exclusive capabilities (or ‘responsibilities’) of drivers, that vehicles will need to adopt to become fully autonomous.)
See
Many vehicles today are already equipped with sensors that allow for easier parking, safer lane changes, and other ADAS functionalities. Currently, the drivers use the information provided to enhance their driving experience and make safer driving decisions, but in the future, it’s the car itself that will take on this role. A fully-autonomous vehicle needs to be able to “see” all of the same things that a human driver does and “see” in even greater detail.
The vehicle’s system will have to take in everything in the surrounding environment - other vehicles on the road, pedestrians, traffic signals, intersections, obstacles, etc. - and it has to collect this information under all scenarios (e.g. all weather and light conditions). To get the necessary 360-degree detailed view in real-time, a combination of cameras, LiDAR, RADAR, ultrasound, and other sensors work together to collect data, process signals, images, video feed, etc., and send them to the vehicle’s “brain” (or brains if there are multiple CCU) to be processed.
While seemingly straight-forward on paper, existing E/E architecture in most vehicles are limited in bandwidth and throughput and are thus unable to transmit the huge amounts of real-time data that will need to be collected, analyzed, and acted upon in split seconds.
Think
Once the sensors have collected the information, the car then needs to “think” to process and analyze the information to command the relevant components or devices to take action: braking, accelerating, swerving, etc. For this to happen effectively, there has to be a very powerful and rapid communication network within the car. There are two main challenges that automakers must overcome to enable a high bandwidth communication network that works effectively - the reliance on separate ECUs for each feature and the way multi-interface communication and data (including low-latency data) is routed inside the vehicle.
The internal workings of a vehicle are complicated enough even without autonomous driving functionality: current vehicle design processes require additional ECU and more cabling for almost every new functionality added. If we continued down this road, self-driving vehicles would exceed the 100-150+ ECUs and miles of heavy wiring modern vehicles already use. This is neither cost-effective nor practical. What’s needed is a high-speed communication network with a highly-developed algorithm that can interpret the signals that are picked up.
Many automotive OEMs and Tier 1 are considering switching to Zonal Architecture and leveraging an ethernet backbone for high-speed communication routing to address these challenges. Instead of a domain-centered approach in which capabilities are bundled together based on their specific functionality, a zonal gateway approach groups ECUs, devices, and sensors based on their location within the vehicle. This switch will result in a consolidation of ECUs to significantly reduce the complexity of internal vehicle communications.

Act
Finally, once the vehicle has ‘assessed the situation’ and determined the correct action to take, it has to then perform that action. Communication from the vehicle’s brain needs to arrive at the relevant actuators and devices with enough time for the desired outcome to be feasible. An all too common occurrence - swerving out of the way of an object that is in the street - requires the sensors to detect the object and send data to the vehicle’s brain and then determine that it needs to activate the brakes. Then the brain sends the command to the brakes to activate and slow down the car which eventually comes to a full stop.
All of this must happen in much less time than it took to read the above paragraph. And this needs to happen hundreds of times every second, for every object and road condition.
While there are a number of cars that currently offer functions like parking assist and automatic emergency braking, where vehicles take action on their own, full Level 5 autonomous driving requires vehicles to have the capacity to take on significantly more complex behaviors. Current vehicles are still limited in their ability to fully “see” and “think” effectively and safely. Once the necessary technology is implemented, the “act” step will become technological feasibility.
So When Will Cars Be Ready to See, Think and Act on Their Own?
As we wrote about in our last report, the consensus remains that it will be many years and many millions of dollars in investment in infrastructure and regulations before fully-autonomous cars go mainstream.
In the meantime, industry leaders are addressing the challenges involved in building cars that understand their environment, analyze huge amounts of data in real time, make split-second decisions, and take action accordingly through innovations in the vehicle’s E/E architecture and supporting technology. The industry’s shift to software-defined vehicles (SDV), in which the cars’ functionalities are enabled and managed through software, requires advancements in many of the same capabilities that we discussed above. These technology investments to power SDVs are creating the strong foundation necessary to ultimately enable fully autonomous vehicles.